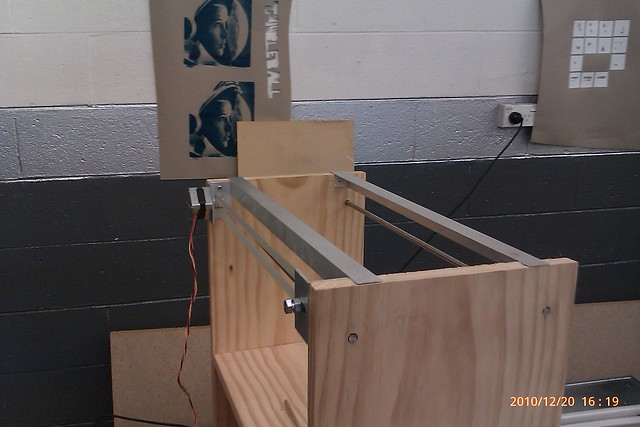
Above is when I mounted the rods, and below is when I attached the belt to the linear bearing.
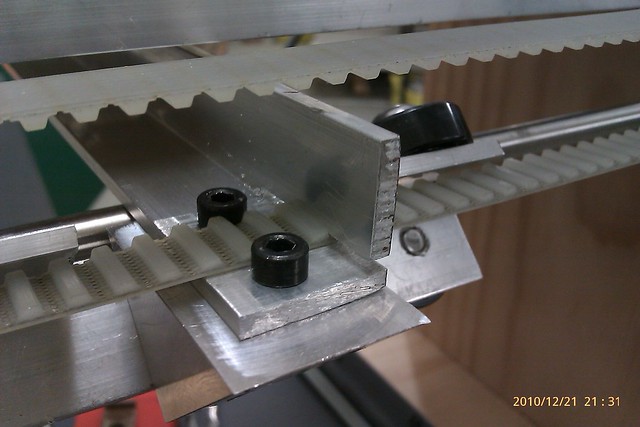
Did you notice how I did it?
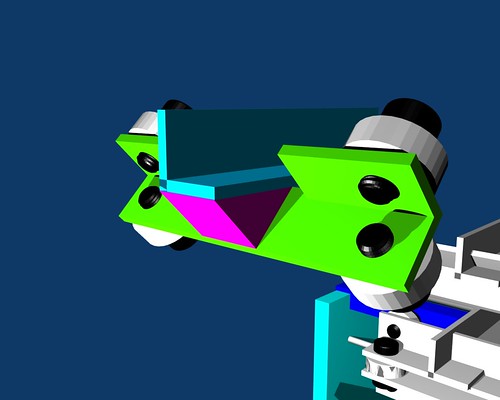
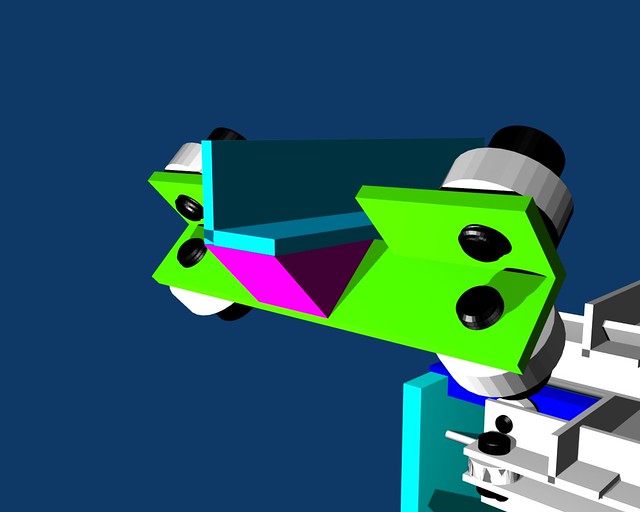
Here is the cross beam

Compared to my sketch in Blender.
That was last night, and it was a hot night too, and I left Tangleball late, so I left the 3D printer in my car. What I did not think about was that I also had to go to the mall after work to do my meager Christmas shopping, as I had to get some bits for my friends' Christmas present which I will drop off tomorrow night, yay, another 2 hour drive there and 2 hour drive back, hope she will like it all the same.

Anywho, back on track, I had to leave my 3D printer at work to save it from being damaged or stolen while I went shopping.
I'm not popular with my boss about doing that, because people are gandering over it, trying to make sense of cocaphoney. Though I did iinvite one guy over to give some feedback, but moments before he did, I peered at it as I was heading from the bathroom, and I noticed something, something real bad.
The rods sag under the weight of the Z axis, greeeat, just what I need!
This is on top of the Y axis needing an extra 608 bearing, larger holes for the other linear bearing so that there is slack enogh to attach springs from one side to the other to pull both linear bearings into full contact with the rod.
Sorry no pic or video because the sag is so timy that the camera won't pick it up, but its a sag of 2mm.
When the guy came over, he suggested making L brackets to mount more 608 bearings on the top aluminium L angle, to offset the weight of the Z axis off the rod.
On all the other ideas, this one is the most doable, and I cam make it with some of the tools I will have available outside of work over Christmas, damn Christmas, ah well can't complain too much, as I need the rest.
current way of making this L bracket, which I will work on sketching up tonight, again, sorry, no photo, is a length of flat aluminium with holes at strategic locations, then bending it in a vice, obiously the 608 bearing will need to be in mounted in a slot for the screw to pass through and the whole thing to move up and down, though I feel I will need more 608 bushings, and if I want any more of those to be made up, then this Friday is my last chance before Christmas.
Once that has been done, I will need to attach yet more springs to equalize the load pressure off the rods.
I still need to mount the Z axis to the bracket and constrain t down with a bearing also, either one of the spare 625 bearings or a 608 bearing, again i've not thought this out completely so it will have to done on the fly.